Full Lifecycle
Auto-Calibration
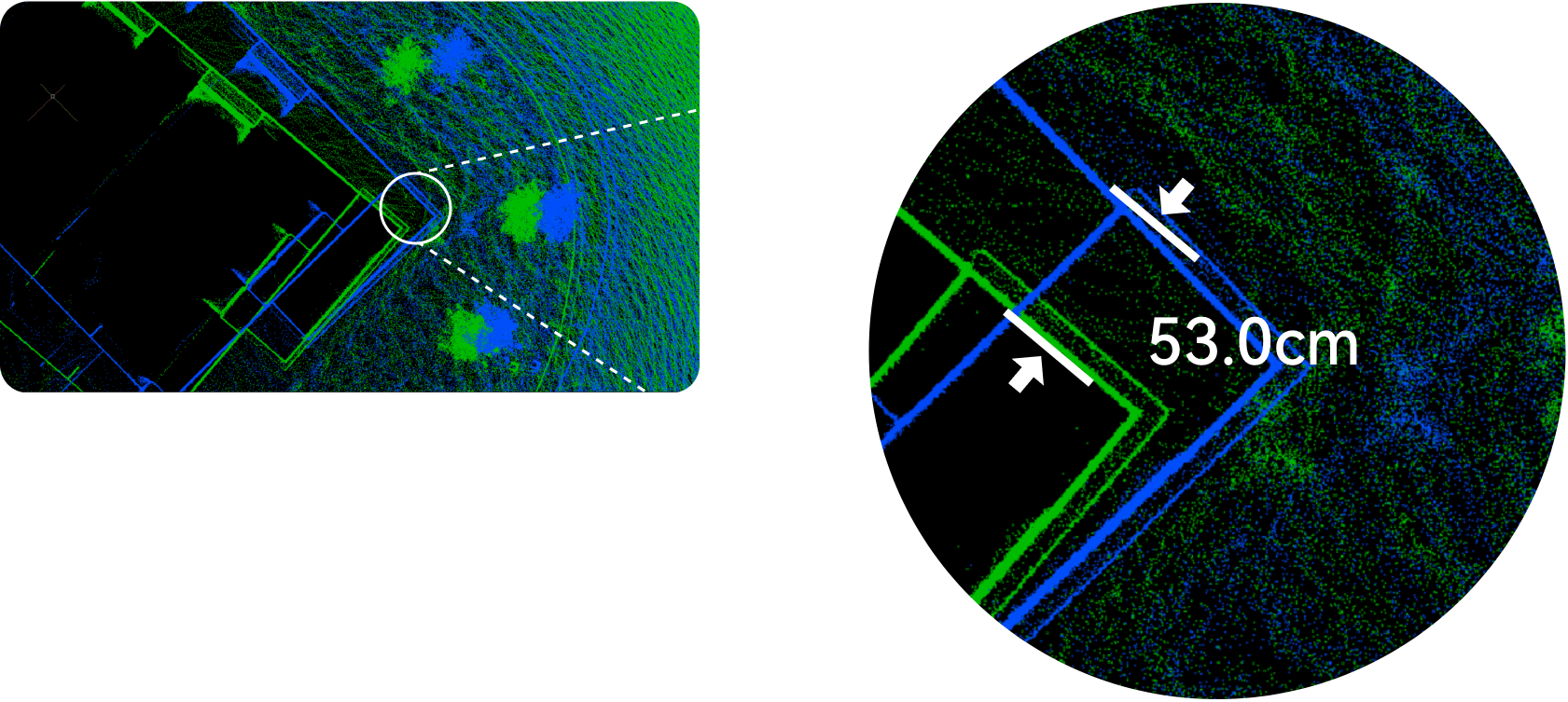
Self-Adaptive Online Calibration (SAOC) technology realizes full lifecycle auto-calibration of the scanner, which ensures that the point cloud thickness is always the same and the accuracy will never deteriorate from the day the scanner is in use, regardless of the frequency of use. There is no need to stop work and return to the factory for calibration.