PRODUCTS
INDUSTRIES
ABOUT
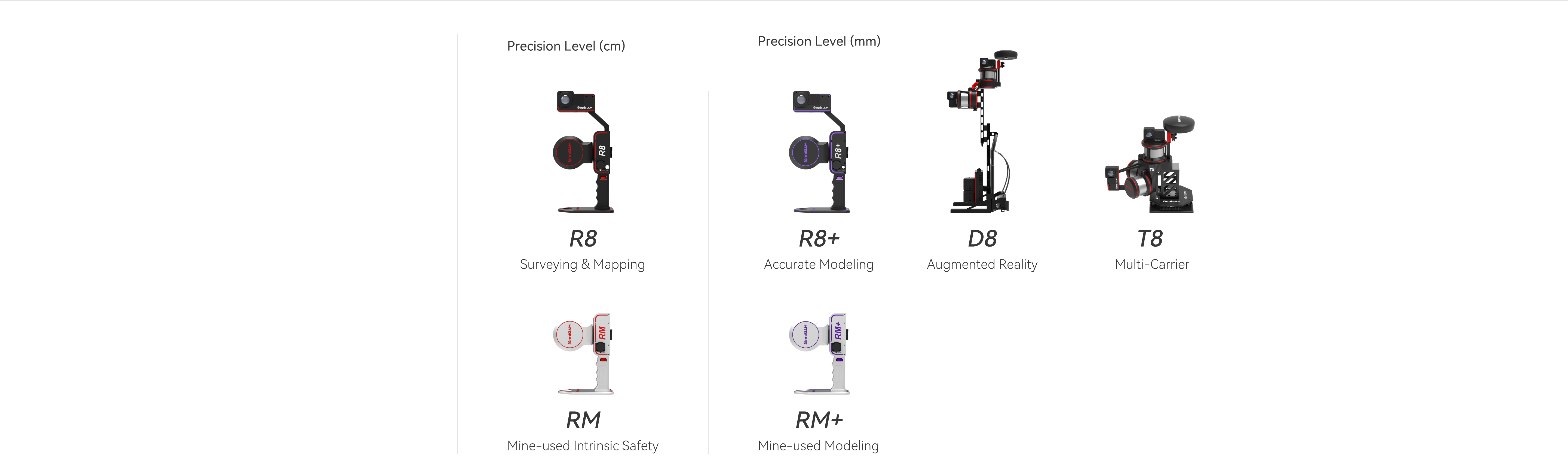
R8 | World-Realistic Color, Precision Level (cm)
1cm
Horizontal 1.8cm
Vertical 2.5cm
0.015°
1cm
10,000pt/m²
2cm
Relative Accuracy
Absolute Accuracy
Horizontal/Vertical Accuracy Error
Point Cloud Thickness
Point Cloud Density
Repeatability Accuracy

R8
Other scanners
1cm thickness of unfiltered point clouds
8cm thickness of unfiltered point clouds
R8
Other scanners
Clear
Ambiguous
R8
Other scanners
Clear view of far from 50m
Ambiguous view of far from 50m
R8
meets 5A-Criterion of
Surveying and Mapping
In the geospatial industry, Any scene is scanned by Anyone in Any
route with Any device at Any time, the UNIQUE point clouds should
be acquired theoretically.
Repeatability Accuracy
R8 meets the strict 5A criteria for surveying and mapping. The repeatability accuracy of the point clouds in WGS84 or local coordinates is within 2 cm by repeatedly scanning.
R8
Repeatability accuracy of twice works
Point cloud coordinates of WGS84
Other scanners
Repeatability accuracy of twice works
Point cloud coordinates of WGS84
*The two types of point clouds in blue and green are acquired by different operators using different devices to scan the same scene in different routes.
OmniSLAM™ PPK-SLAMT
Tightly Coupled Complementary Filtering Algorithm
In the case of weak RTK signal quality, Misleading GNSS Fix may occur, which leads to the wrong point clouds. OmniSLAM™ PPK-SLAM, an innovative type of Tightly Coupled Complementary Filtering Algorithm independently developed by OmniSLAM™, which is able to maintain accurate fixed solutions. Even in challenging environments, it can still acquire the WGS84 point clouds of 1:500 accuracy.
DLG(1:500) of Color Point Clouds
“Horizontal & Veritical”of
Point Clouds
The Mobile SLAM Color 3D Laser Scanner can generate absolute horizontal and vertical WGS84 point clouds. The horizontal and vertical accuracy error is within 0.015°
Horizontal accuracy of other scanner
Horizontal accuracy of R8
Vertical accuracy of other scanner
Vertical accuracy of R8
Accuracy Report
OmniSLAM™ Mapper generates an Accuracy Report, which provides the Mean Value of Absolute Deviation(MVAD) of point clouds for each scan and the 3D thermal map of point cloud accuracy.
Accuracy Thermal Map of
Point Clouds
Multi-view “thermal map”, the different colors show the different accuracy, the position of accuracy point clouds is clear.
GCP Inserting Instruction
The Mobile SLAM Color 3D Laser Scanner of OmniSLAM™ generates GCP Inserting Instruction. * For the point clouds of unsatisfied accuracy of a certain scan, the instuction will suggest the quantity and positon of GCP for generating efficiently
“Detailed”
Carving of Point Clouds
R8 obtains the thickness of unfiltered point clouds is 1cm with real edge and clear text.
R8-16
16
120m
320,000
Laser Channels
Measure Range
Point per Second
R8-32
32
120m
640,000
Laser Channels
Measure Range
Point per Second
R8-300
32
300m
640,000
Laser Channels
Measure Range
Point per Second