PRODUCTS
INDUSTRIES
ABOUT
Carving the Real World Accurately
OmniSLAM™ has long been dedicated to advancing the research and application of Artificial Intelligence and Robotics Technology in various fields, including surveying and mapping of geospatial information, digital twins, digital factories, intelligent manufacturing, the metaverse, and multimedia, etc.
OmniSLAM™ has developed highly accurate mobile color 3D laser scanners with proprietary technologies, including the R8, R8+, D8, and T8 models.
OmniSLAM™ commits to exploring the frontiers of science and technology, guided by the vision of “CARVING THE REAL WORLD ACCURATELY”, replicating the real world in the digital realm.
Carving the Real World Accurately
Take responsibility for fostering the
development of industries, advancing
social progress, and collaborating to
create genuine value for humanity.
Users First, Team Work,
Keep Going, Develop the Best



























July, 2016
OmniSLAM™ was established.
We have been striving to create a digital world with the dream of utilizing technology to accurately replicate a better world.
March, 2018
First Generation, OmniSLAM™ DLP6-Premium launched.
DLP6-Premium, a mobile SLAM 3D laser scanner independently developed by OmniSLAM™ , addresses the lack of domestic products in the mobile scanner market, provides users more options.
May, 2019
Second Generation, OmniSLAM™ DLP6-Lite launched.
DLP6-Lite opened a new era of 3D color point clouds which is the second generation of Mobile SLAM Laser Scanner with fixed dual lidar.
April, 2020
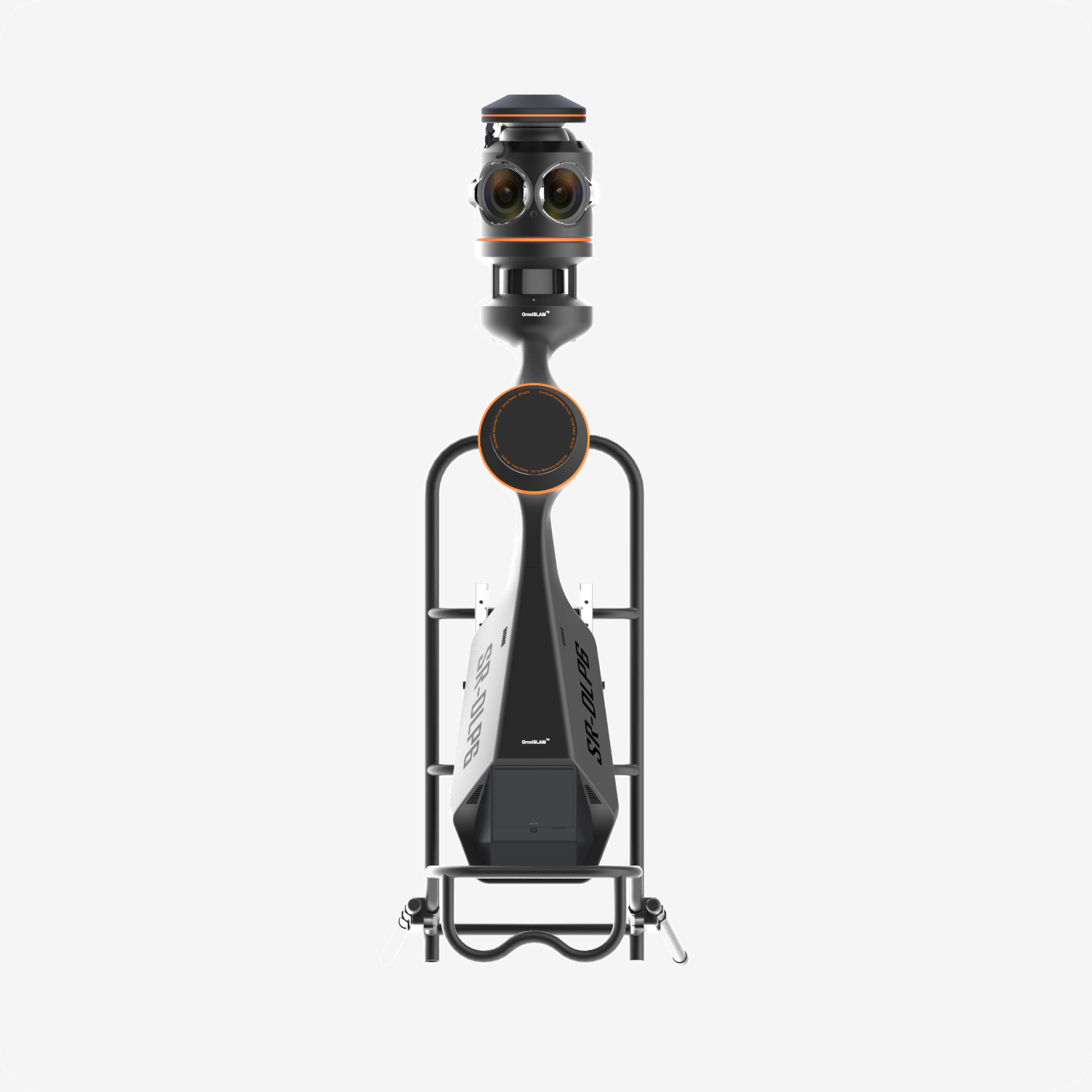
OmniSLAM™ RLP6 developed the handheld scanning method.
RLP6 achieved the point cloud with a rotating single lidar, the handheld scanning is a new approach to 3D data acquisition.
February, 2021
RTK-SLAM
(Tightly coupled complementary filtering algorithm of Real-Time Kinematic.)
OmniSLAM RTK-SLAM, an unique type of Tightly Coupled Complementary Filtering Algorithm, enables users to acquire the point clouds with accuracy of less than 3cm in WGS84, so that there's no need for GCP.
June, 2022
OmniSLAM™ Surveying and Mapping device R8 launched.
The new generation of the Rotating Single Lidar Mobile 3D Scanner, the R8, offers the WGS84 accuracy within 3cm. lt's generated for final surveys which makes significant strides in the professional surveying and mapping field.
Augst, 2022
LIO-PANO Colorization Technology
(Online colorization technology with multi-model fusion of lidar and panoramic camera.)
Using LlO-PANO can generate vivid color point clouds from detailed spots to large-scale scenes, facilitating the precise measurement, modeling, and plotting.
November, 2022
OmniSLAM™ D8L Integrated Industrial Panoramic Camera Ladybug 5+.
For the situation of that vehicle-on scanners cannot support, OmniSLAM™ D8L is able to acquire panoramic data and point clouds of large-scale scenes.
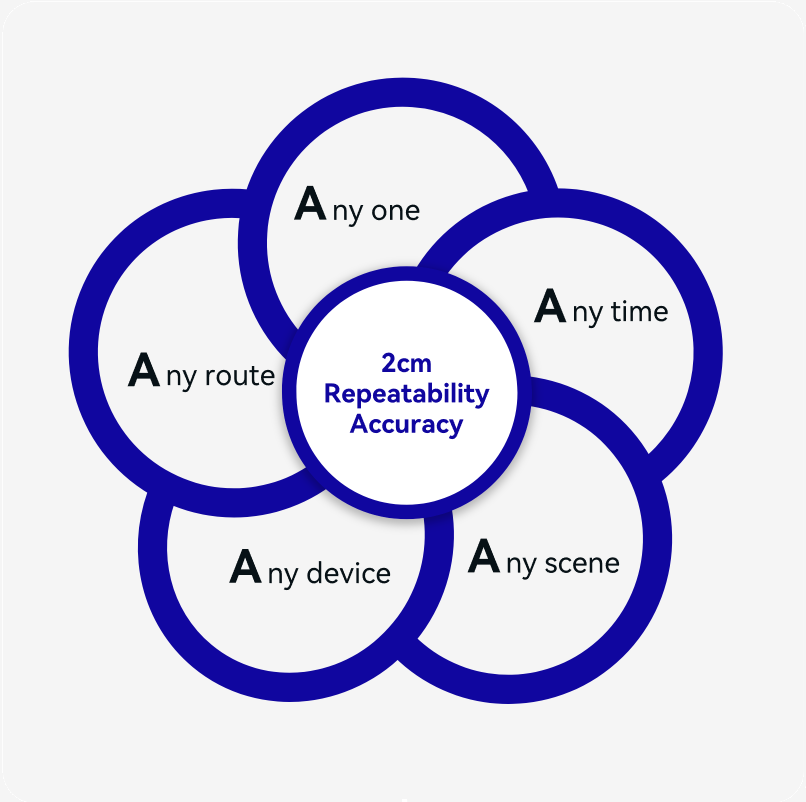
March, 2023
OmniSLAM™ proposed 5A Criteria for Surveying and Mapping.
The strict 5A criteria for surveying and mapping, the repeatability accuracy of the point clouds in WGS84 or local coordinates is within 2cm by repeatedly scanning.
June, 2023
Fixed Dual Lidar Mobile Scanner with precision level (mm) D8 launched.
OmniSLAM™ D8 achieved 2mm point cloud accuracy, 4mm point cloud thickness, and 250,000pts/s point cloud density. lts colorization and texture is clear and detailed, the mobile 3D laser scanner starts the ERA of precision level(mm).
July, 2023
OmniSLAM™ launched brandnew products of General Measuring scanner R6.
R6 achieved moving object removal for point clouds, the WGS84 accuracy is within 3cm, point cloud density is within 1cm, these factors meet the requirements of General Measuring scanner.
October, 2023
LiRF
(Lidar Radiance Fields)
LiRF optimized depth, density, thickness, colorization, and outline of point clouds, which made point clouds much more real.
November, 2023
Accuracy Report
OmniSLAM™ Mapper generates an Accuracy Report, which provides the Mean Value of Absolute Deviation(MVAD) of point clouds for each scan and the 3D thermal map of point cloud accuracy.
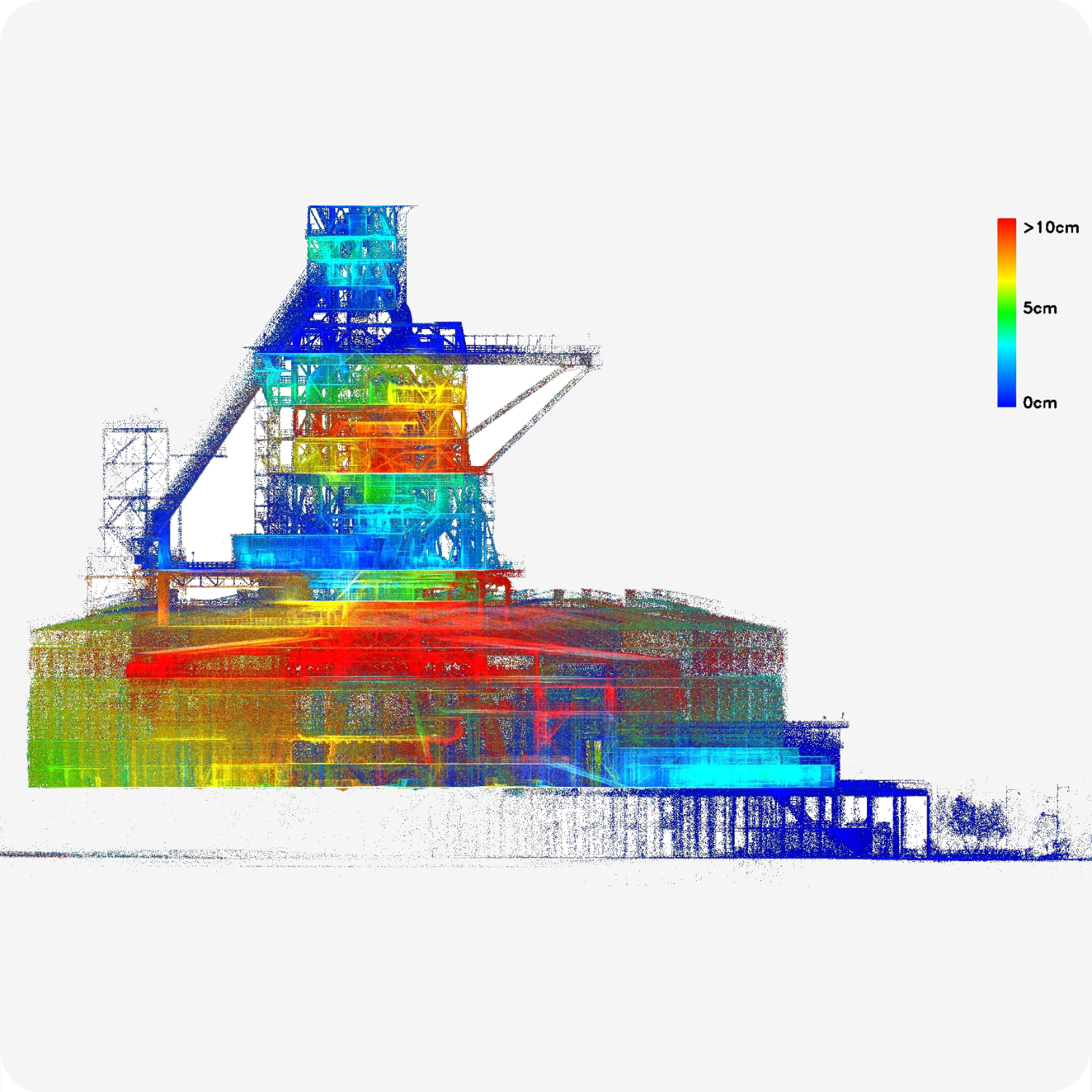
December, 2023
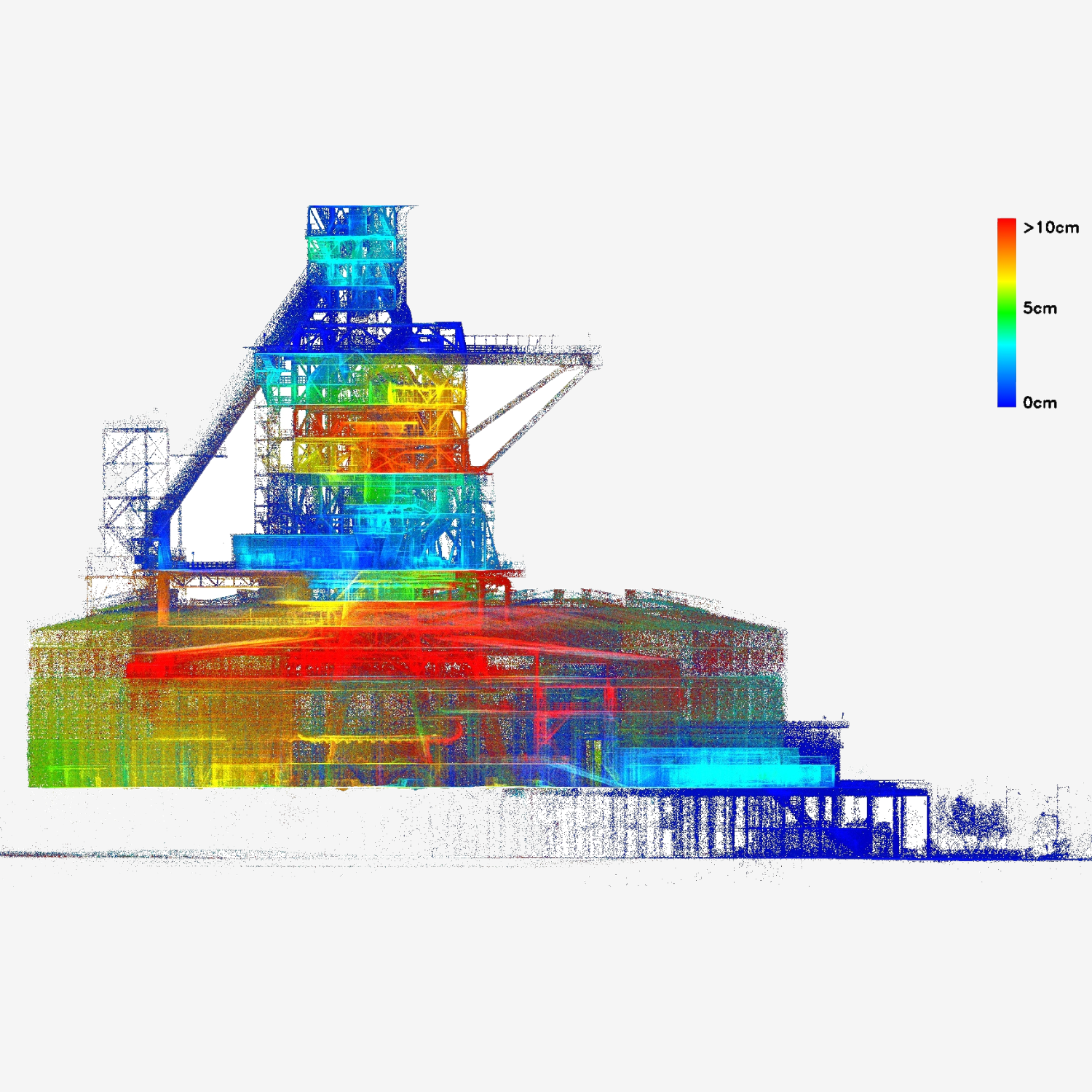
3D Thermal Map of Point Cloud Accuracy
OmniSLAM™ generated point clouds creatively by Thermal Map, supporting users to view data accuracy of point clouds like "in person".
December, 2023
GCP Inserting Instruction
The Mobile SLAM Color 3D Laser Scanner generates GCP Inserting Instruction. For the point clouds with unsatisfactory accuracy from a certain scan, the instructions will recommend the quantity and position of GCP.
January, 2024
PPK-SLAM
(Tightly coupled complementary filtering algorithm of Post-Processed Kinematic.)
In the case of weak RTK signal quality, Misleading GNSS Fix may occur, which leads to the wrong point clouds. OmniSLAM™ PPK-SLAM, an innovative type of Tightly Coupled Complementary Filtering Algorithm independently developed by OmniSLAM™, which is able to maintain accurate fixed solutions. Even in challenging environments, it can still acquire the WGS84 point clouds of 1:500 accuracy.
February, 2024
OmniSLAM™ Accurate Modeling equipment R8+ launched.
R8+ is a precision level (mm) scanner, which carves precised point clouds from the real world.
July, 2016
OmniSLAM™ was established.
We have been striving to create a digital world with the dream of utilizing technology to accurately replicate a better world.
March, 2018
First Generation, OmniSLAM™ DLP6-Premium launched.
DLP6-Premium, a mobile SLAM 3D laser scanner independently developed by OmniSLAM™ , addresses the lack of domestic products in the mobile scanner market, provides users more options.
May, 2019
Second Generation, OmniSLAM™ DLP6-Lite launched.
DLP6-Lite opened a new era of 3D color point clouds which is the second generation of Mobile SLAM Laser Scanner with fixed dual lidar.
April, 2020
OmniSLAM™ RLP6 developed the handheld scanning method.
RLP6 achieved the point cloud with a rotating single lidar, the handheld scanning is a new approach to 3D data acquisition.
February, 2021
RTK-SLAM
(Tightly coupled complementary filtering algorithm of Real-Time Kinematic.)
OmniSLAM RTK-SLAM, an unique type of Tightly Coupled Complementary Filtering Algorithm, enables users to acquire the point clouds with accuracy of less than 3cm in WGS84, so that there's no need for GCP.
June, 2022
OmniSLAM™ Surveying and Mapping device R8 launched.
The new generation of the Rotating Single Lidar Mobile 3D Scanner, the R8, offers the WGS84 accuracy within 3cm. lt's generated for final surveys which makes significant strides in the professional surveying and mapping field.
Augst, 2022
LIO-PANO Colorization Technology
(Online colorization technology with multi-model fusion of lidar and panoramic camera.)
Using LlO-PANO can generate vivid color point clouds from detailed spots to large-scale scenes, facilitating the precise measurement, modeling, and plotting.
November, 2022
OmniSLAM™ D8L Integrated Industrial Panoramic Camera Ladybug 5+.
For the situation of that vehicle-on scanners cannot support, OmniSLAM™ D8L is able to acquire panoramic data and point clouds of large-scale scenes.
March, 2023
OmniSLAM™ proposed 5A Criteria for Surveying and Mapping.
The strict 5A criteria for surveying and mapping, the repeatability accuracy of the point clouds in WGS84 or local coordinates is within 2cm by repeatedly scanning.
June, 2023
Fixed Dual Lidar Mobile Scanner with precision level (mm) D8 launched.
OmniSLAM™ D8 achieved 2mm point cloud accuracy, 4mm point cloud thickness, and 250,000pts/s point cloud density. lts colorization and texture is clear and detailed, the mobile 3D laser scanner starts the ERA of precision level(mm).
July, 2023
OmniSLAM™ launched brandnew products of General Measuring scanner R6.
R6 achieved moving object removal for point clouds, the WGS84 accuracy is within 3cm, point cloud density is within 1cm, these factors meet the requirements of General Measuring scanner.
October, 2023
LiRF
(Lidar Radiance Fields)
LiRF optimized depth, density, thickness, colorization, and outline of point clouds, which made point clouds much more real.
November, 2023
Accuracy Report
OmniSLAM™ Mapper generates an Accuracy Report, which provides the Mean Value of Absolute Deviation(MVAD) of point clouds for each scan and the 3D thermal map of point cloud accuracy.
December, 2023
3D Thermal Map of Point Cloud Accuracy
OmniSLAM™ generated point clouds creatively by Thermal Map, supporting users to view data accuracy of point clouds like "in person".
December, 2023
GCP Inserting Instruction
The Mobile SLAM Color 3D Laser Scanner generates GCP Inserting Instruction. For the point clouds with unsatisfactory accuracy from a certain scan, the instructions will recommend the quantity and position of GCP.
January, 2024
PPK-SLAM
(Tightly coupled complementary filtering algorithm of Post-Processed Kinematic.)
In the case of weak RTK signal quality, Misleading GNSS Fix may occur, which leads to the wrong point clouds. OmniSLAM™ PPK-SLAM, an innovative type of Tightly Coupled Complementary Filtering Algorithm independently developed by OmniSLAM™, which is able to maintain accurate fixed solutions. Even in challenging environments, it can still acquire the WGS84 point clouds of 1:500 accuracy.
February, 2024
OmniSLAM™ Accurate Modeling equipment R8+ launched.
R8+ is a precision level (mm) scanner, which carves precised point clouds from the real world.
July, 2016
OmniSLAM™ was established.
We have been striving to create a digital world with the dream of utilizing technology to accurately replicate a better world.
March, 2018
First Generation, OmniSLAM™ DLP6-Premium launched.
DLP6-Premium, a mobile SLAM 3D laser scanner independently developed by OmniSLAM™ , addresses the lack of domestic products in the mobile scanner market, provides users more options.
May, 2019
Second Generation, OmniSLAM™ DLP6-Lite launched.
DLP6-Lite opened a new era of 3D color point clouds which is the second generation of Mobile SLAM Laser Scanner with fixed dual lidar.
April, 2020
OmniSLAM™ RLP6 developed the handheld scanning method.
RLP6 achieved the point cloud with a rotating single lidar, the handheld scanning is a new approach to 3D data acquisition.
February, 2021
RTK-SLAM
(Tightly coupled complementary filtering algorithm of Real-Time Kinematic.)
OmniSLAM RTK-SLAM, an unique type of Tightly Coupled Complementary Filtering Algorithm, enables users to acquire the point clouds with accuracy of less than 3cm in WGS84, so that there's no need for GCP.
June, 2022
OmniSLAM™ Surveying and Mapping device R8 launched.
The new generation of the Rotating Single Lidar Mobile 3D Scanner, the R8, offers the WGS84 accuracy within 3cm. lt's generated for final surveys which makes significant strides in the professional surveying and mapping field.
Augst, 2022
LIO-PANO Colorization Technology
(Online colorization technology with multi-model fusion of lidar and panoramic camera.)
Using LlO-PANO can generate vivid color point clouds from detailed spots to large-scale scenes, facilitating the precise measurement, modeling, and plotting.
November, 2022
OmniSLAM™ D8L Integrated Industrial Panoramic Camera Ladybug 5+.
For the situation of that vehicle-on scanners cannot support, OmniSLAM™ D8L is able to acquire panoramic data and point clouds of large-scale scenes.
March, 2023
OmniSLAM™ proposed 5A Criteria for Surveying and Mapping.
The strict 5A criteria for surveying and mapping, the repeatability accuracy of the point clouds in WGS84 or local coordinates is within 2cm by repeatedly scanning.
June, 2023
Fixed Dual Lidar Mobile Scanner with precision level (mm) D8 launched.
OmniSLAM™ D8 achieved 2mm point cloud accuracy, 4mm point cloud thickness, and 250,000pts/s point cloud density. lts colorization and texture is clear and detailed, the mobile 3D laser scanner starts the ERA of precision level(mm).
July, 2023
OmniSLAM™ launched brandnew products of General Measuring scanner R6.
R6 achieved moving object removal for point clouds, the WGS84 accuracy is within 3cm, point cloud density is within 1cm, these factors meet the requirements of General Measuring scanner.
October, 2023
LiRF
(Lidar Radiance Fields)
LiRF optimized depth, density, thickness, colorization, and outline of point clouds, which made point clouds much more real.
November, 2023
Accuracy Report
OmniSLAM™ Mapper generates an Accuracy Report, which provides the Mean Value of Absolute Deviation(MVAD) of point clouds for each scan and the 3D thermal map of point cloud accuracy.
December, 2023
3D Thermal Map of Point Cloud Accuracy
OmniSLAM™ generated point clouds creatively by Thermal Map, supporting users to view data accuracy of point clouds like "in person".
December, 2023
GCP Inserting Instruction
The Mobile SLAM Color 3D Laser Scanner generates GCP Inserting Instruction. For the point clouds with unsatisfactory accuracy from a certain scan, the instructions will recommend the quantity and position of GCP.
January, 2024
PPK-SLAM
(Tightly coupled complementary filtering algorithm of Post-Processed Kinematic.)
In the case of weak RTK signal quality, Misleading GNSS Fix may occur, which leads to the wrong point clouds. OmniSLAM™ PPK-SLAM, an innovative type of Tightly Coupled Complementary Filtering Algorithm independently developed by OmniSLAM™, which is able to maintain accurate fixed solutions. Even in challenging environments, it can still acquire the WGS84 point clouds of 1:500 accuracy.
February, 2024
OmniSLAM™ Accurate Modeling equipment R8+ launched.
R8+ is a precision level (mm) scanner, which carves precised point clouds from the real world.
2016
2018
2019
2020
2021
2022
2023
2024