Project Highlights

Client Introduction

Founded in 2024 and headquartered in Xian, LEVEL-HK (徕沃氪), is a China-based technology enterprise focused on 3D digitalization for infrastructure, industrial facilities, and engineering projects. The company is built on nearly 20 years of accumulated industry experience from its founding team and specializes in delivering reliable 3D data for complex and time-sensitive environments.
LEVEL-HK provides end-to-end services covering 3D data acquisition, processing, and information delivery. Its technical capabilities include handheld and mobile SLAM laser scanning, high-precision total-station control integration, and engineering-grade data processing workflows. The company supports applications such as surveying and geospatial information, BIM and digital construction, transportation infrastructure, and heritage digitization, offering scalable solutions tailored to real-world engineering requirements.
Project Overview
Mine-Tunnel surveying is a fundamental activity in mining engineering, providing the geometric basis for excavation control, safety assessment, and long-term asset management.
Within this context, the project sought to monitor tunnel deformation during active construction by capturing accurate geometric data to evaluate deviations between the as-built tunnel and the design model. To overcome the low efficiency and operational disruption of conventional static surveying methods, a mobile scanning solution was adopted to deliver rapid, survey-grade results.
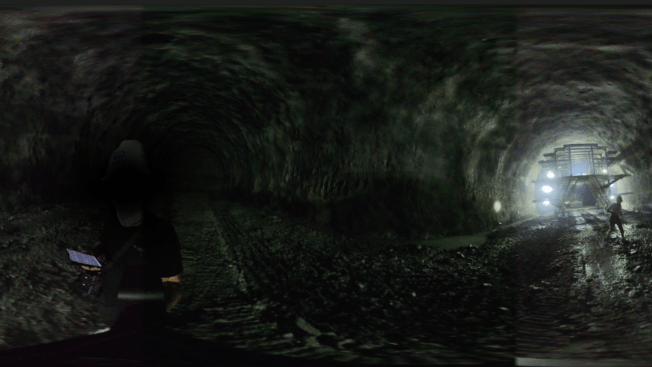
The survey took place inside an underground mine in China, within a straight, horizontal mine tunnel that expands into a large underground with approximately a 10 meters width and 9 meter height. Extending over a total length of 300 meters, the tunnel environment presented typical mining conditions, including dust, humidity, limited ventilation, low ambient lighting, and the presence of equipment throughout the tunnel.
The client required the tunnel survey data to be delivered in LAS format, to ensure seamless integration with existing software environments used for geometric comparison and further evaluation.
Project success was defined not only by a single metric, but by a combination of technical performance and operational efficiency. The delivered data were required to achieve an accuracy threshold of 3 centimeters, while also being captured with minimal on-site service time and full mine coverage, together establishing the criteria by which the overall outcome of the project would be judged.
Into the Tunnel: Conditions and Constraints
The project environment defined the constraints from the outset:
The survey was carried out inside an active underground mine, where working hours were restricted and equipment movement within the tunnel limited access during field activities. Dust, humidity, limited ventilation, and low ambient lighting were present along the tunnel. These conditions collectively constrained the operational window and working environment for data acquisition.
In terms of technical constraints, the underground mine tunnel imposed inherent limitations on three-dimensional data capture. Its straight, highly repetitive structure provided few distinctive features for SLAM-based localization, leading to an increased risk of positional drift along the tunnel length. In the absence of GNSS, reliance on pure SLAM and survey control allowed localization errors to accumulate, making it difficult to maintain the level of accuracy required for deformation and over-excavation assessment.
Ultimately, the challenge of this project centered on a single question:
efficiently under these mining conditions?
OmniSLAM Solution
Mine-Tunnel surveying has traditionally been fulfilled using static terrestrial laser scanners combined with total-station measurements. While being highly accurate, this method comes at a cost: It's time consuming which negatively impacts the project progress.
To enhance efficiency without sacrificing accuracy, a handheld SLAM-based workflow was introduced using the OmniSLAM R8+. The primary goal of the solution was straightforward: Minimizing on-site acquisition and operate reliably under GNSS-denied underground mining environments.
Field Workflow: Scanning Strategy and Data Acquisition
Data acquisition was performed using a single continuous handheld scan covering approximately 300 meters of the mine-tunnel. Following a linear scanning strategy rather than relying on loop closures or repeated passes, the scan was completed in 10 minutes by two operators walking at a normal pace. Areas with active moving machinery were intentionally excluded from scanning for safety and data integrity reasons.
Control and Coordinate Referencing Strategy
To anchor the SLAM data within a reliable coordinate framework, the approach made use of pre-established traverse control points provided by the construction team and measured using total-station surveying. These control points were directly obsereved during scanning and served to assign absolute coordinates to the SLAM trajectory.
Six control points were used as constraints during processing, while ten additional points were reserved as independent check points for validation.
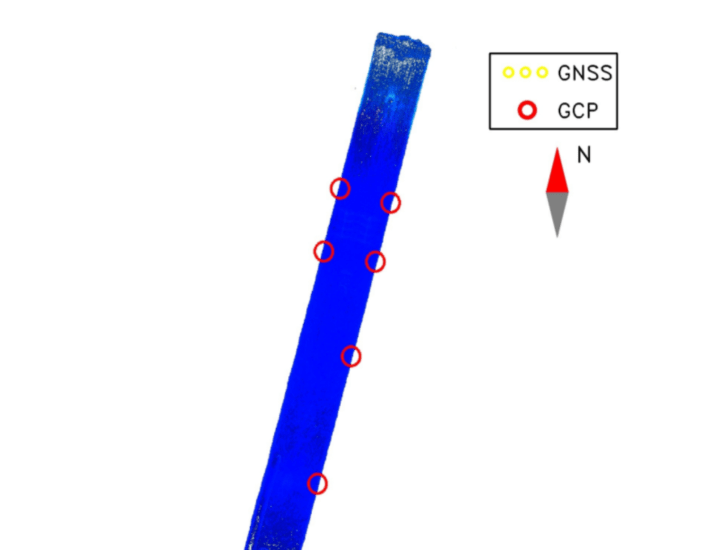
Control point distribution used to constrain the SLAM trajectory.
Processing Pipeline and Drift Handling
Once data acquisition was completed, the focus moved to turning the raw SLAM data into a reliable and usable representation of the underground space. Data processing was completed in OmniSLAM Mapper with a total processing time of approximately 50 minutes. The workflow began with SLAM-based trajectory estimation under underground conditions, after which control-point adjustment were applied to constrain drift and align the dataset to the project coordinate system. With the trajectory stabilized, the full tunnel geometry was reconstructed with a high degree of confidence. A dense point cloud of the tunnel interior was generated with an average point spacing of approximately 0.5 cm. The final output was a clean, high-quality point cloud ready for downstream analysis and engineering evaluation.
Further processing steps involved removing dynamic objects and noise filtering to provide a final clean, high-quality output suitable for deformation monitoring.
Validation and Quality Assurance
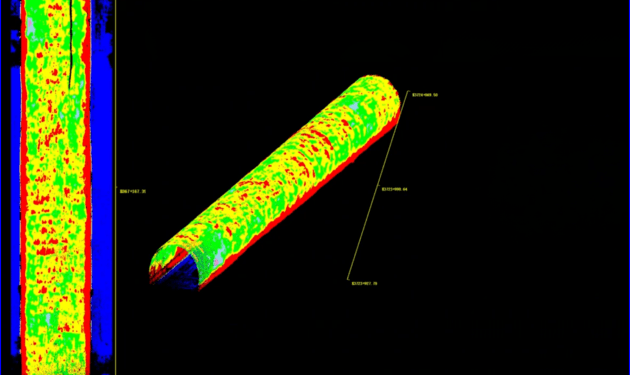
The quality assurance of the final dataset was confirmed through a series of independent verification steps. A set of ten check points, measured via total-station traverse surveying, independently of the control points applied during processing, were used to validate the constrained solution. Accuracy evaluation confirms a stable point cloud solution, with heat map visualization illustrating consistent point-level accuracy along the tunnel alignment.
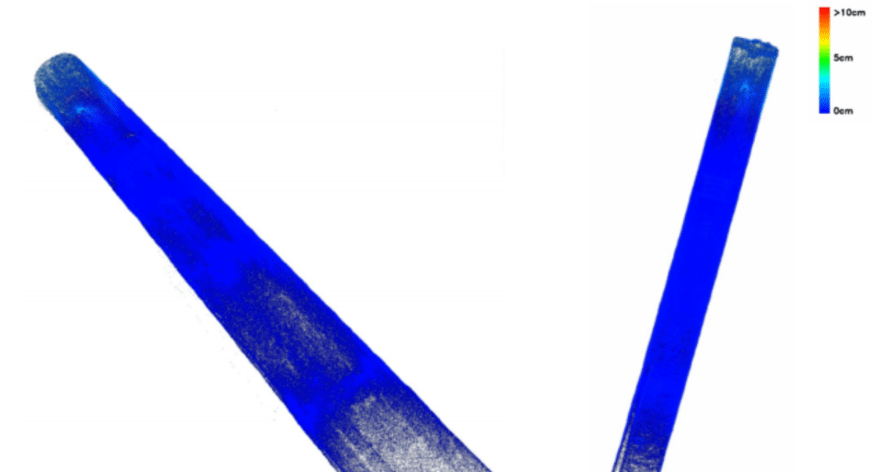
Point cloud accuracy heat maps.
Final approval relied on a over-excavation analysis, comparing the delivered point cloud with the design model. A 5 cm threshold displayed in software outputs served as an internal system quality reference rather than a contractual acceptance tolerance.
| Absolute Error Range | Point Count | Percentage |
|---|---|---|
| 0-1 cm | 25,035,706 | 98.00% |
| 1-2 cm | 508,932 | 1.992% |
| 2-5 cm | 6 | 0.000% |
| 5-10 cm | 0 | 0.000% |
| 10-20 cm | 0 | 0.000% |
| ≥ 20 cm | 0 | 0.000% |
Accuracy Interval Table
Workflow Diagram
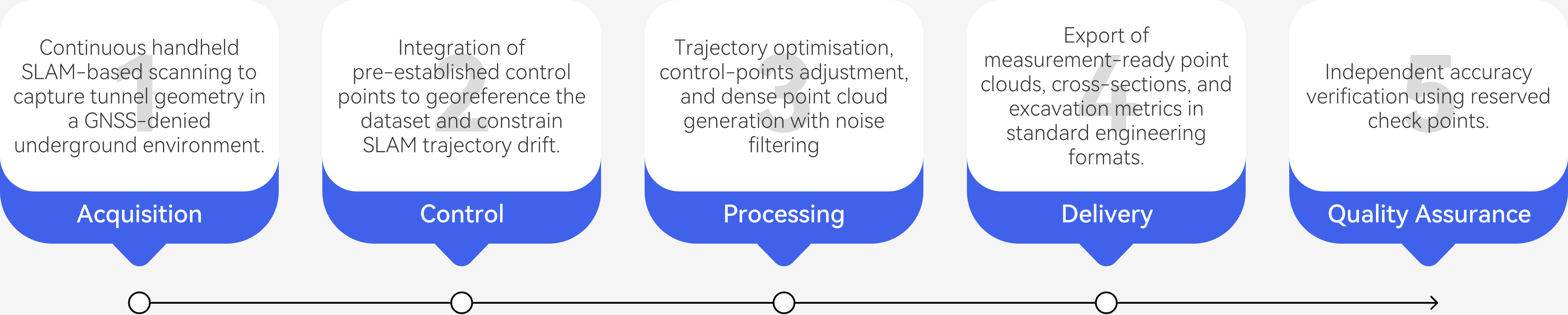
Workflow Diagram
RESULTS
From a single continuous handheld scan of approximately 300 m, the project produced accurate and interpretable tunnel geometry suitable for deformation and over-excavation assessment, while significantly improving survey efficiency and on-site safety.
Quantitative Results
• An accuracy tolerance of 3 cm was required by the client, while the final point cloud demonstrated an accuracy of < 1 cm, surpassing the specified requirement.
• Cross-sectional agreement with the design mode demonstrates good geometric consistency of the SLAM delivered point cloud throughout the mine-tunnel.
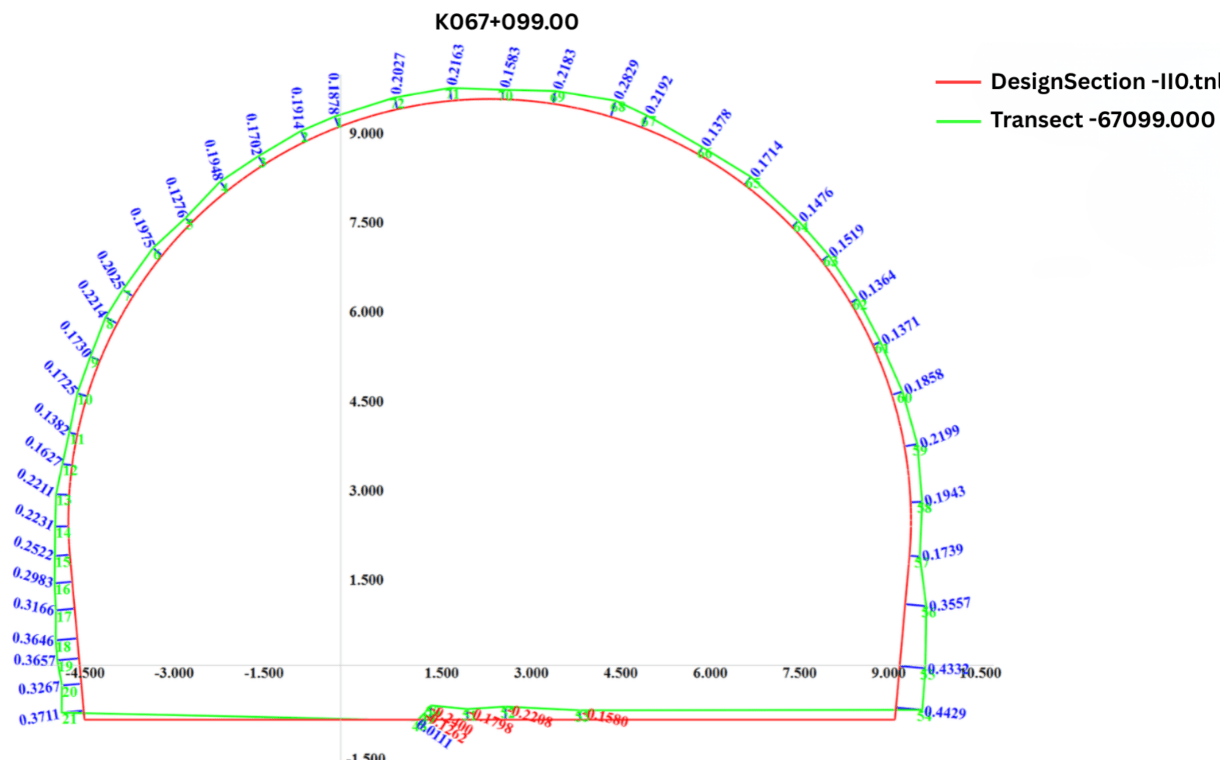
with design model at chainage K067+099.
• Quantitative excavation statistics were derived by integrating sectional area differences along the tunnel chainage, producing over-break and under-break volumes for engineering evaluation.
| Metric | Value |
|---|---|
| Design Cross-Section Area | 124.988 ㎡ |
| Measured Cross-Section Area | 129.326 ㎡ |
| Maximum Over-Excavation | 0.443 m |
| Maximum Under-Excavation | -0.240 m |
| Total Over-Excavation Area | 5.991 ㎡ |
| Total Under-Excavation Area | 1.653 ㎡ |
| Average Over-Excavation | 0.221 m |
| Average Under-Excavation | 0.185 m |
• An average of 0.5 cm point spacing was achieved , which in result provides sufficient spatial resolution for detailed geometric analysis of the tunnel interior and excavation-quality evaluation.
• Approximately 300 m of tunnel was surveyed in about 10 minutes, representing a 1:10 reduction in field time compared with static terrestrial laser scanning. Data processing followed a 1:5 field-to-processing time ratio, enabling rapid delivery of usable results.
Qualitative Results
• Free from segmentation gaps or alignment breaks, the mine-tunnel was represented as a single, continuous point cloud
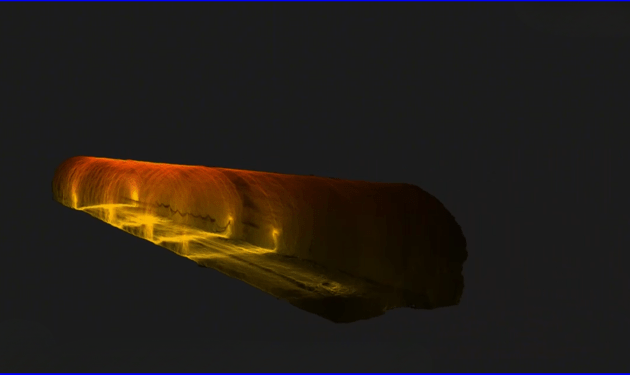
• Over-excavation and under-excavation across the crown and sidewalls of the mine-tunnel were clearly visualized through the inner wall extraction.
• Reduced underground survey time, has led to a decrease in their exposure to danger, reduced re-entry into hazardous areas, and the elimination of repeated tripod installations during active operations.
Deliverables
• A fully registered tunnel interior point cloud, with an achieved accuracy of 2cm delivered in LAS format.
• Color-mapped deviation point clouds generated to quantify measured geometry with the design model.
• Extracted tunnel cross-sections suitable for CAD environments to support engineering design.
• Chainage-based tabulation of over- and under-excavation quantities, enabling consistent volumetric assessment.
Business Impact
By integrating the handheld OmniSLAM 3D mobile laser scanner into its workflow, the company was able to reduced the amount of time required on site compared with conventional survey methods, which in turn lowered overall project costs, without sacrificing the quality of the final output. One the other hand, the quick access to the processed data enabled engineering teams to review excavation results and plan next steps with minimal delay.
CONTACT US
support@omni-slam.com
Contact with your product representative.