Project Highlights

Client Introduction
Established in 1998 and headquartered in Užice, Serbia, GBK provides surveying and geospatial services to the AEC sectors. The company offers precise, effective 3D models and CAD drawings customized for every project, and specializes in 3D laser scanning, photogrammetry, and scan-to-BIM/CAD deliverables.

Opening Scene
The engagement began after the team had already captured the 3-storey, 1,500 m² building in Užice using a TLS. Each corridor required a setup, each room another scan, and occlusions often demanded extra stations. The result was an excellent point cloud, but it took roughly 1.5 days of stop-start field work to complete.
The next question was whether the same building could be documented faster without sacrificing centimetre-level accuracy for measurement and BIM. The target dataset needed full multi-floor coverage, including above-ceiling areas and exterior context, ideally paired with panoramic imagery to support downstream visualization.
To meet those expectations, OmniSLAM proposed the R8+ mobile LiDAR system: a single, continuous walkthrough designed to capture the full interior in motion and produce a seamless point cloud ready for direct comparison with the TLS dataset and suitable for real estate surveying, BIM, and construction measurement.
TLS Performance in Užice

Prior to assessing a new approach, the client needed a clear baseline of the TLS's actual performance.
Using a tripod-mounted scanner, the team established a traditional network of control points and then progressed room by room. Walls, doors, stair cores, and furniture created frequent occlusions, so additional stations were introduced to fill in missing geometry. On a multi-storey structure with narrow corridors and service rooms, those additional setups quickly accumulated.
One and a half days of intermittent scanning were required, while the scanner was moved through corridors, rooms, and staircases, along with about four hours of post-processing to register the scans, align them with control, and conduct quality checks. The completed point cloud achieved the accuracy goal, yet the workflow was disjointed.
Challenge: Accuracy Without the Bottleneck
Despite the proven accuracy of traditional TLS, the workflow came with trade-offs that limited real-world efficiency. The time expense was significant, and every additional hour on site increased scheduling, staffing, and operational costs. In buildings with many floors, narrow corridors, or frequent re-configurations, and with limited access periods,this procedure was not just inconvenient—it was bottleneck.
For decision-makers, the inquiry shifted from:


That challenge defined the true test for OmniSLAM.
Plan of Attack: OmniSLAM Solution
The plan began with a straightforward question:
Could we achieve the same precision as a terrestrial
laser scanner, but in a fraction of the time?
Control network & checkpoints
Our OmniSLAM R8+ followed a single continuous trajectory. Sixteen control points were measured across the building to secure control and provide an independent basis for later validation. To keep the verification transparent, ten evenly distributed checkpoints were designated in advance, with accuracy criteria agreed upon by the team.
Single continuous capture
Once the control points were established, a single operator conducted the mobile capture, guiding the OmniSLAM R8+ through all corridors and floors. In one uninterrupted pass, the entire interior was scanned in just 16 minutes.
Processing & deliverables
Back in the office, the processing took roughly one hour, during which the trajectory was aligned to control, point density was optimized, and final deliverables were generated:
• Seamless point cloud
• High-resolution panoramic imagery
• An optional mesh model ready for BIM
| STAGE | KEY ACTIONS | TIME |
|---|---|---|
| Plan Control | Planned and marked 16 control points across three floors to anchor the trajectory and ensure accurate alignment. | 3.5 h |
| Capture | Single continuous walkthrough using the OmniSLAM R8+, carried out by two operators: one guiding the scanner through corridors, rooms, and stairwells, while the other monitored live data and coverage. | 16 min |
| Process | Performed trajectory optimisation and control alignment in OmniSLAM Mapper, followed by generation of point clouds, trajectory files, panoramic imagery, and an optional mesh model. | ~ 1 h |
| Visualize | Opened the processed dataset in OmniSLAM Viewer for quick 3D visualisation, inspection, and quality confirmation prior to export. | Part of the processing |
| Output | Final deliverables included a dense point cloud, precise trajectory, high-resolution panoramic images, and a mesh model ready for BIM and measurement applications. | Same day |
OmniSLAM R8+ Workflow Deep Dive
The experience on site was completely different. It was quiet, fast, and continuous. Our R8+ moved smoothly through spaces where tripods once stands for hours, and the process that had had once taken two full shifts was now over before the coffee cooled.
TLS VS OmniSLAM
Workflow: TLS vs OmniSLAM
| Process Stage |
Traditional
Method (TLS) |
OmniSLAM R8+
Solution |
Improvement /
Impact |
|---|---|---|---|
| Control point setup | ~2 hours to establish 8 control points | ~3.5 hours to establish 16 control points | 2× denser control network for mobile SLAM and validation. |
| Field capture | ~1.5 days of stop-start tripod scanning, many station setups | 16 minutes single continuous walkthrough for full interior coverage | Field capture time reduced from days to minutes, with minimal disruption to on-site activities. |
| Data post-processing | ~4 hours manual registration and alignment to control | ~1 hour trajectory optimisation and export | 75% less processing time before data is ready for BIM measurement. |
| Point-cloud thickness | Approx. 3 mm point-cloud thickness | Approx. 2 mm point-cloud thickness | ~33% tighter thickness, sharper geometry for measurement and modelling. |
| Point-cloud completeness | Some data loss in partially occluded areas (limited scanner viewpoints) | Complete point cloud along the walking path | More reliable coverage in corridors, corners, and complex interiors. |
| Deliverables | Point clouds and panoramic images | Point clouds, panoramic images, continuous trajectory, optional mesh | Richer outputs from a single capture, with no extra time on site. |
| Crew utilisation | 2-person crew occupied for entire 1.5 day campaign | Same 2-person crew, but on site for minutes | Same headcount, much lower total labour-hours per project. |
OmniSLAM R8+ vs TLS - Process comparision
Accuracy & Data Quality
Speed alone wasn’t enough. The mobile scanner’s results also needed to match the TLS in both accuracy and geometry fidelity.
To keep validation transparent, ten checkpoints were selected and evenly distributed throughout the survey area.These checkpoints were chosen independently of the control points used for registration, ensuring that the accuracy assessment reflected real performance rather than alignment artifacts. At each checkpoint, the position obtained from the OmniSLAM R8+ point cloud was compared to the matching position from the TLS dataset.
All ten checkpoints fell within the predetermined accuracy limits, confirming TLS-grade accuracy for this building.

Checkpoint Distribution
The horizontal and vertical differences between the two datasets were computed from these checkpoints, the RMSE were then drive:
Planar Accuracy Comparison (m)
| 1 | 7410123.363554 | 4838556.645838 | 7410123.359203 | 4838556.634816 | 0.004351 | 0.011022 | 0.011849712 |
| 2 | 7410118.05194 | 4838549.361615 | 7410118.037007 | 4838549.352369 | -0.001813 | 0.009246 | 0.009422074 |
| 3 | 7410122.892842 | 4838544.606438 | 7410122.901056 | 4838544.604172 | -0.008214 | 0.002266 | 0.00852083 |
| 4 | 7410130.082127 | 4838544.809654 | 7410130.086376 | 4838544.820134 | -0.004249 | -0.01048 | 0.011308598 |
| 5 | 7410135.398429 | 4838545.012383 | 7410135.404773 | 4838545.004951 | -0.006344 | 0.007432 | 0.009771436 |
| 6 | 7410119.329488 | 4838539.409614 | 7410119.334020 | 4838539.413240 | -0.004532 | -0.00362 | 0.005804042 |
| 7 | 7410125.388242 | 4838542.611550 | 7410125.397305 | 4838542.609001 | -0.009063 | 0.002548 | 0.009414636 |
| 8 | 7410130.607647 | 4838538.604624 | 7410130.619827 | 4838538.606323 | -0.01218 | -0.00169 | 0.012297927 |
| 9 | 7410136.565765 | 4838542.352875 | 7410136.574617 | 4838542.343316 | -0.008852 | 0.009559 | 0.013028138 |
| 10 | 7410120.003495 | 4838533.447223 | 7410120.009731 | 4838533.442582 | -0.006236 | 0.004641 | 0.007773453 |
| Planar RMSE | +0.010143379 |

Planar Accuracy
Vertical Accuracy Comparison (m)
| 1 | 880.967097 | 880.962443 | 0.004654 |
| 2 | 881.258238 | 881.253623 | 0.004615 |
| 3 | 880.944041 | 880.938544 | 0.005497 |
| 4 | 881.210626 | 881.214822 | -0.004196 |
| 5 | 881.235307 | 881.232541 | 0.002766 |
| 6 | 882.495574 | 882.492248 | 0.003326 |
| 7 | 880.960363 | 880.956996 | 0.003367 |
| 8 | 881.245219 | 881.232613 | 0.012606 |
| 9 | 884.006972 | 883.999803 | 0.007169 |
| 10 | 879.663810 | 879.669096 | -0.005286 |
| Vertical RMSE | ±0.005992317 |

Vertical Accuracy
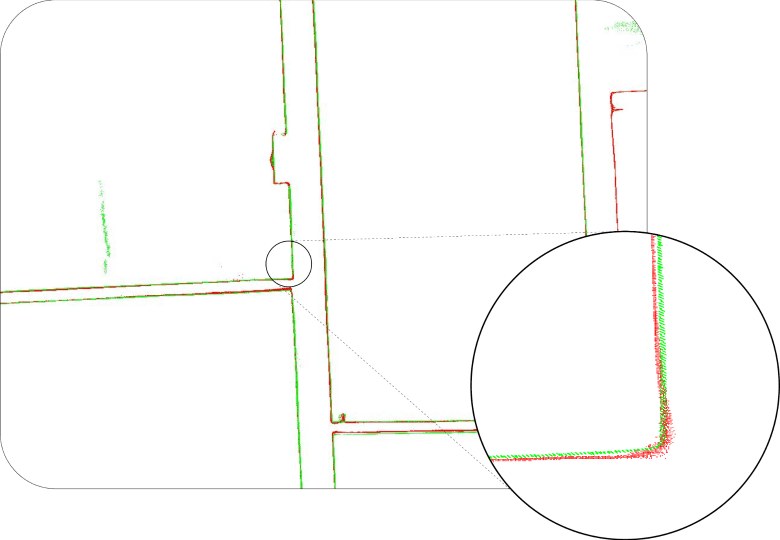
Visual Alignment: TLS vs OmniSLAM R8+
Visual comparisons at both local and global scales supported the numerical results. In the Point Cloud Registration View, the green line (TLS) and the red line (OmniSLAM R8+) lay neatly on top of each other across intersecting walls and corridors, with clean, sharp edges and no sign of drift over the length of the trajectory. The zoomed comparison at key building corners reinforced this finding, showing the two profiles closely overlapping with no discernible bias.
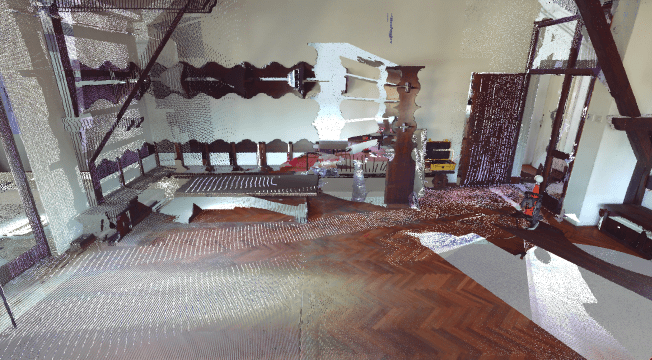
Point cloud Quality: TLS vs OmniSLAM R8+
Static TLS delivers high accuracy, but in complex interiors it can miss hidden elements and produce uneven density. OmniSLAM R8+ keeps the centimetre-level precision while capturing more complete, cleaner point clouds in a single walkthrough.
Hidden elements and occlusions
Tripod-based stations can leave gaps behind furniture and shelving where line-of-sight is limited. A continuous SLAM trajectory helps recover geometry in these partially occluded areas.

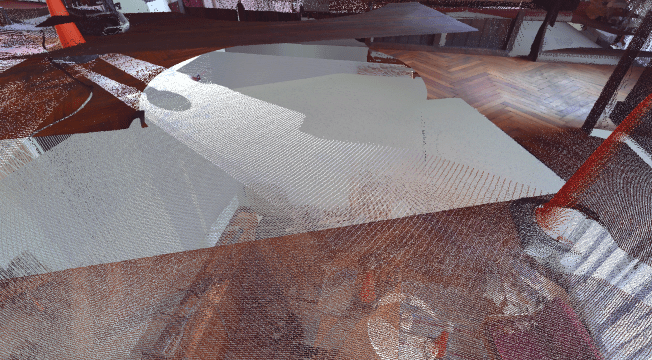
Point-cloud density and completeness
Uneven density and localized noise can complicate surface extraction for BIM and measurement. A single continuous pass improves uniformity across floors and walls.

RESULTS
From a single 16-minute walkthrough, the client obtained a dataset that was as precise as their TLS benchmark and significantly streamlined the planning, recording, and utilization of interior surveys.
Quantitative impact
- The OmniSLAM point cloud lined up with the TLS reference to within about 1 cm horizontally and 6 mm vertically, with all 10 checkpoints staying inside the acceptance band agreed with the client.
- What had previously required around 1.5 days of tripod-based TLS scanning was reduced to a 16-minute continuous walk through the same 2,500 m² building—roughly a 99% reduction in field capture time.
- Instead of about 4 hours of TLS registration and alignment, the OmniSLAM dataset went from raw recording to ready-to-use outputs in roughly 1 hour, cutting processing time by around 75%.
- The mobile scan produced a tighter, cleaner cloud: surfaces were about 2 mm thick on average, compared with roughly 3 mm for TLS, and point density was more even across floors and walls.
• TLS-grade accuracy
• Time on site
• Time to usable data
• Point-cloud structure
Qualitative impact
- Beyond the metrics, the project also changed the day-to-day experience for the client’s teams:
- • One integrated colorized point cloud (LAS/LAZ / E57),for all interiors and stairwells, instead of managing dozens of separate TLS stations.
- • High-resolution panoramic imagery gave BIM teams immediate visual context for issues and coordination, without extra site visits.
- • Optional 3D mesh model
- • A concise QA summary with checkpoint statistics and registration settings
Outcome & Impact Business Impact
By adopting OmniSLAM, GBK has shifted interior capture from a station-based workflow to a fast, continuous mobile process that reduces operational friction and shortens the path from survey to deliverable.
The new workflow lowers survey costs by cutting crew-hours and minimizing repeat visits, while keeping high-quality scanning viable for projects with tight budgets and limited access windows.
Deliverables are also streamlined for BIM and project teams, combining a single integrated colorized point cloud with panoramic imagery that improves coordination and supports confident decision-making without additional site disruption.
Together, these gains strengthen GBK’s ability to provide fast, cost-efficient scan-to-BIM and scan-to-CAD services and to compete more effectively for schedule-sensitive interior and retrofit.
CONTACT US
support@omni-slam.com
Contact with your product representative.